Mª Tomás Rodríguez y Ciro Moreno, Doctores en ingeniería, exponen las líneas de investigación seguidas a la hora de estudiar y, en definitiva, tratar de controlar la dinámica de unas motocicletas tan llamativas como sujetas a múltiples factores capaces de transformar la experiencia de ensueño en desagradable pesadilla en un abrir y cerrar de ojos. Revive la exposición con esta breve reseña. (Click en título para más)
Varios siglos de evolución y desarrollo hasta dar con el panorama sobre 2 ruedas que nos rodea no hacen sino potenciar la necesidad de dar pronta solución a unos riesgos que no paran de cobrarse daños materiales y, por supuesto, humanos a diario. La Doctora Rodríguez, Profesora en City University of London, no dudó en hacer rápida alusión a los modelos matemáticos que, una vez más, son la base sobre la que cimentar la solución al problema ingenieril tratado.
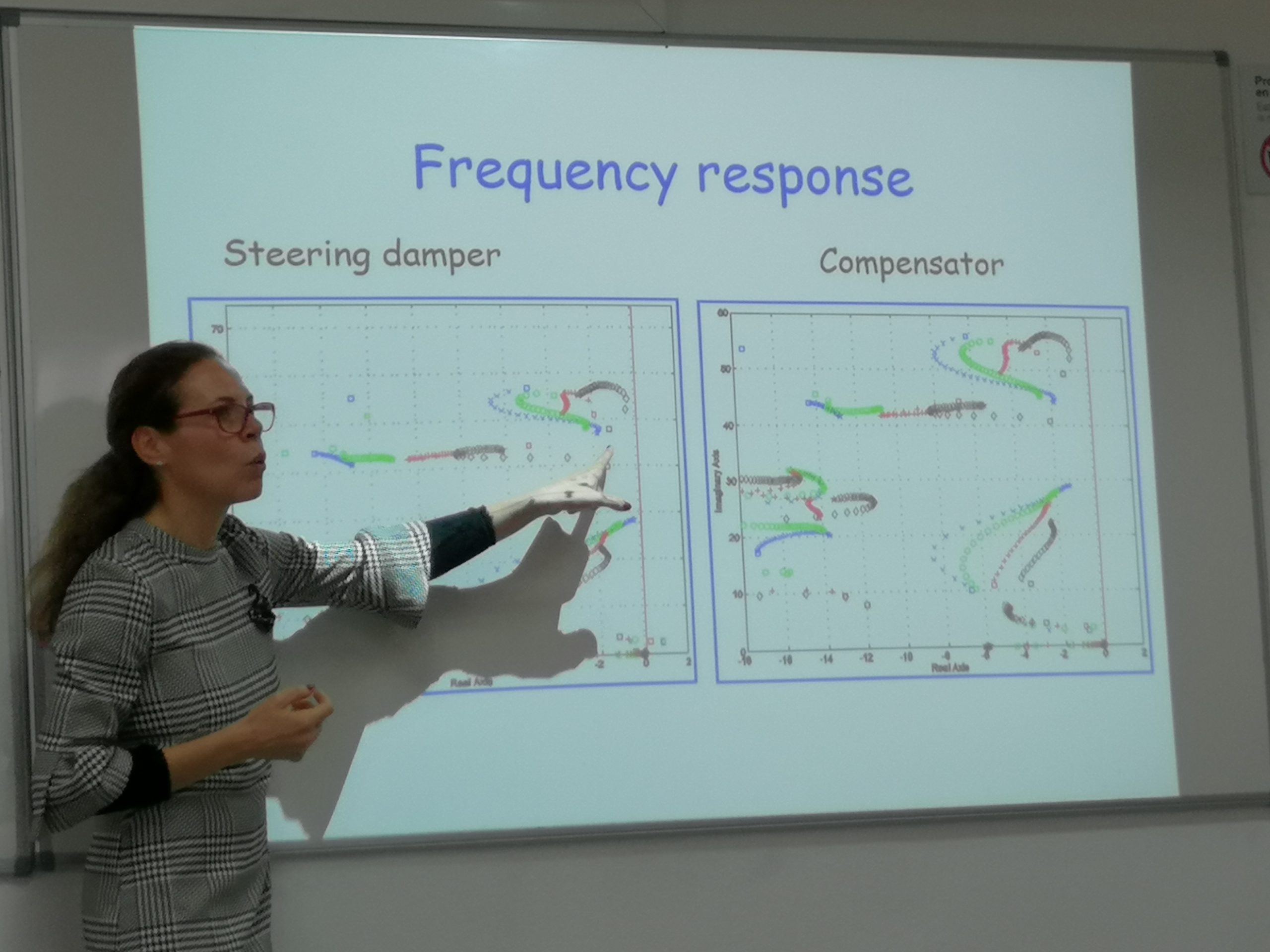
En este caso, nada mejor que considerar la moto como un sistema ligado a una serie de autovalores o grados de libertad a los que la máquina está sujeta mientras se mueve, teniendo por objetivo llevarlos a la zona de comportamiento estable. Testimonios y visualizaciones reales de todo tipo de incidentes, así como el encomiable avance de las herramientas de simulación, motivaron la inclusión de nuevos parámetros en un organismo mecánico dispuesto a solventar sus particulares «Talones de Aquiles» en la dinámica lateral: «Capsize» (oscilaciones con tendencia al vuelco a baja velocidad que, a su vez, desaparece mientras se alcanza un ritmo mayor), «Weave» (zigzagueo de todo el conjunto suspendido) o «Wobble» (oscilación de la parte delantera que aumenta de intensidad y frecuencia con el incremento de la velocidad). La primera herramienta que nació a partir de este estudio fue el amortiguador de dirección, controlador que, aun solventando la cuestión relacionada con este último punto débil, no pudo evitar el aumento del riesgo de oscilación en toda la máquina («Weave») a gran velocidad, dando pie a manuales en los que cada marca explicaba al usuario cómo evitar llegar a este punto o, en términos matemáticos, colocar este autovalor en zona inestable. Tras ello, aparece en escena el «Inerter» o compensador de dirección, instrumento capaz de controlar «Weave» y «Wobble» simultáneamente que, sin embargo, se topó con falta de interés necesario (debido quizás al coste que llevaba consigo un cambio en la línea de producción) para llevarlo a formar parte del instrumental de las motocicletas posteriores. Mentes ligadas incluso a la Fórmula 1 se han implicado en el desarrollo de una vertiente que, gracias a los resultados de una nueva simulación con compensadores pasivos y activos (requiriendo energía para adaptarse a cambios constantes del entorno), vuelve a llamar a la puerta de un sector en el que la seguridad parece habitar en la cuerda floja.
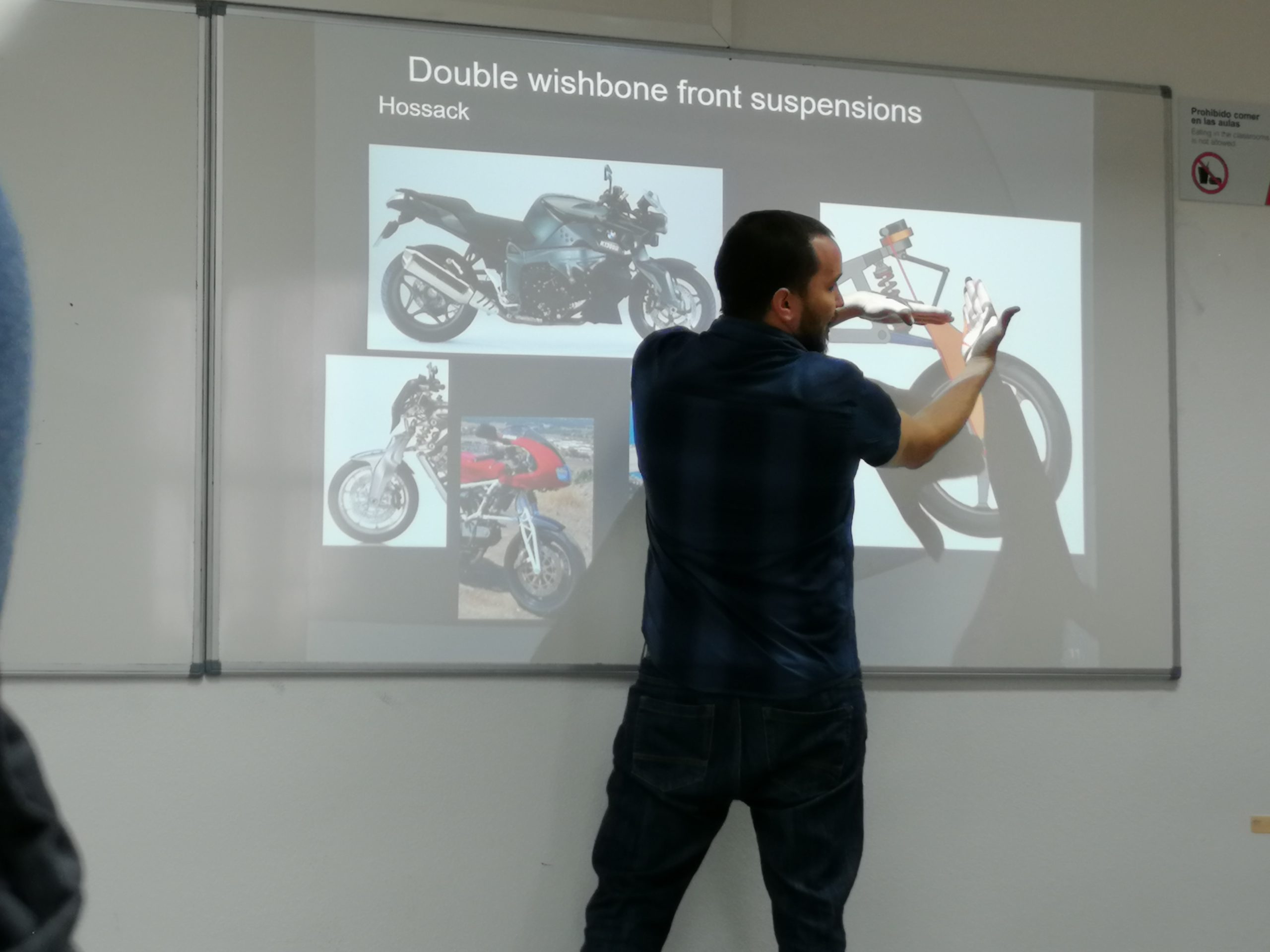
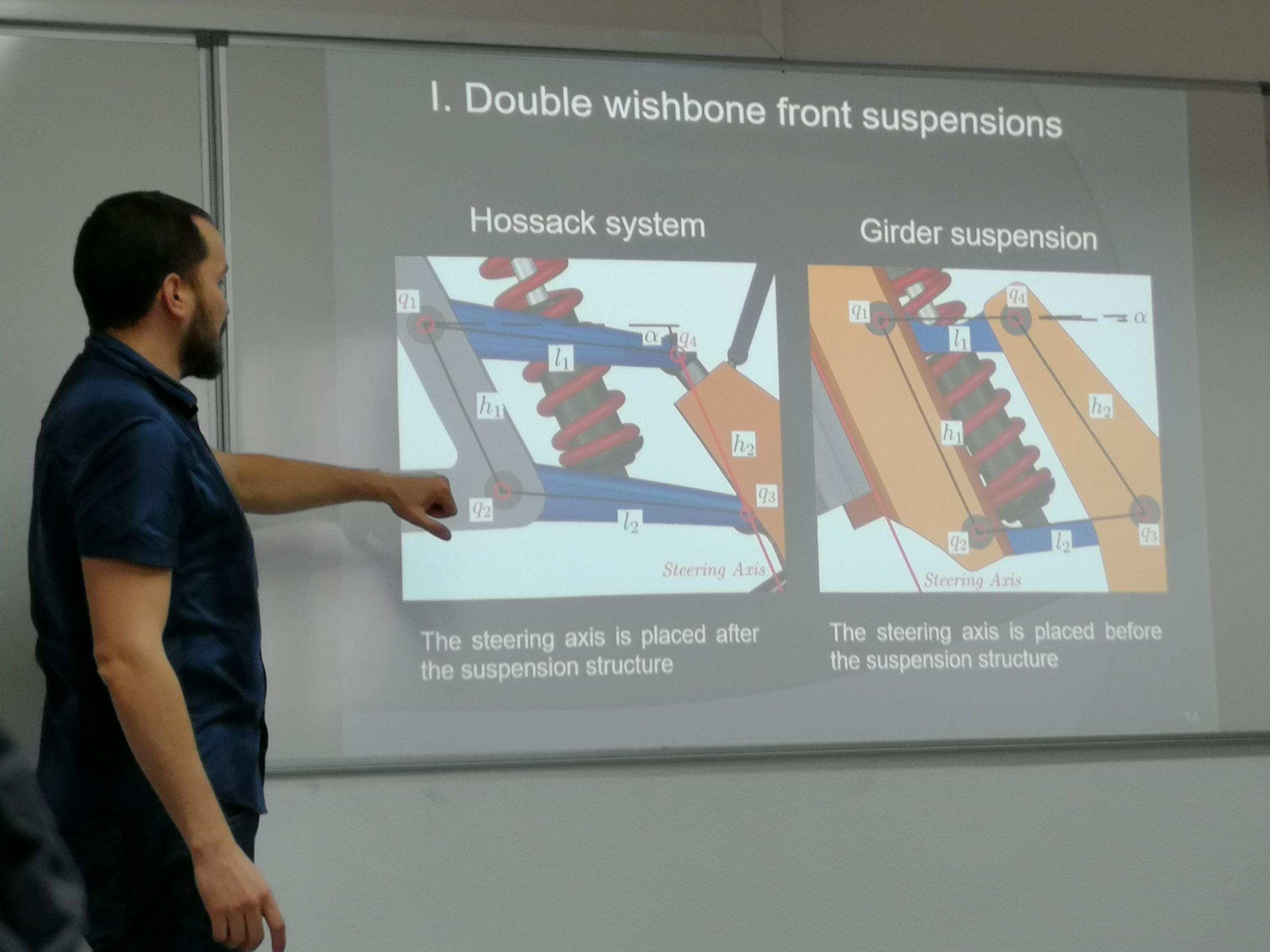
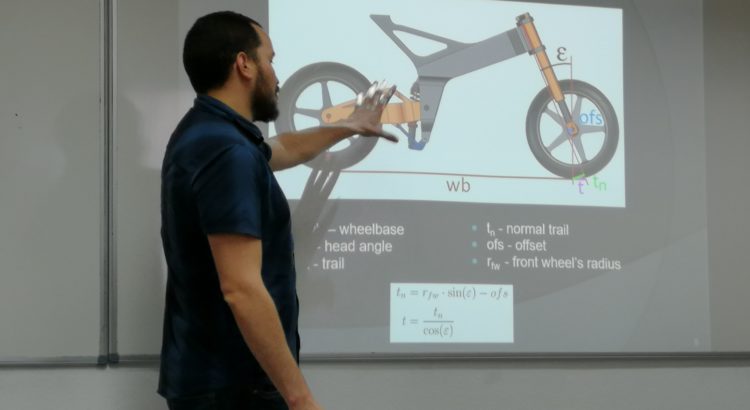
El Doctor Moreno, profesor en la Universidad Nebrija, colocó, además, el énfasis sobre los sistemas de suspensión delantera en estos vehículos, evaluando posibles mejoras gracias a la implantación de un doble trapecio que, según se posicione con adelanto («Girder», previo a un eje con igual dirección que la horquilla telescópica inicial, brindando comportamiento nervioso e ideal en curvas de circuito) o retraso respecto al eje de la dirección («Hossack», donde el eje anterior mantiene su orientación para conformar un conjunto dotado de mayor estabilidad en recta y absorción de energía), sea capaz de proporcionar eficiencia y ayuda adicionales al sistema inicial compuesto por la horquilla mencionada.
Incuestionable importancia tienen estas charlas y exposiciones en las que, sin duda, conseguimos saber cómo dar nombre, explicación y, en un número creciente de casos, solución de provecho a múltiples fenómenos que también forman parte del mundo sobre 2 y 4 ruedas que tanto nos apasiona. ¡Gran forma de cerrar año y década deseándoos Feliz Navidad!